S. Hanna, E. Krijestorac, and D. Cabric, "Destination-Feedback Free Distributed Transmit Beamforming Using Guided Directionality" in IEEE Transactions on Mobile Computing 2022
Cognitive Reconfigurable Embedded Systems Lab
-
 CORES Lab - UCLA
CORES Lab - UCLA
UAV Swarms Distributed Beamforming for Range Extension
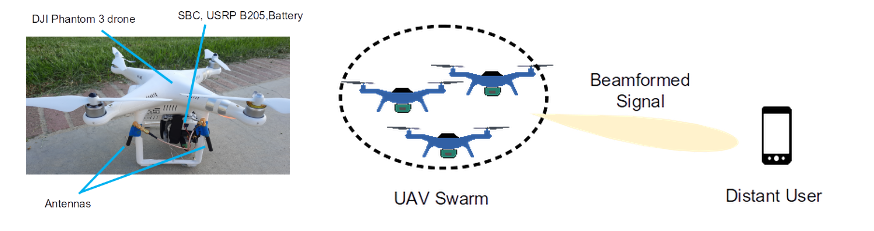
The mobility and ease of deployment of unmanned aerial vehicles lead to their widespread adoption in many applications like wildlife monitoring, search and rescue, and disaster management. Many of these applications require the deployment of a swarm of collaborating UAVs in remote areas with no communications infrastructure. To establish a long range communications link, the UAVs need to collaborate to send the same signal, a scheme known as distributed beamforming. For a signal, from separate transmitters to combine coherently at the destination, their transmissions need to be time synchronized and their carriers aligned in phase and frequency. Flying UAVs need to achieve this synchronization over the air in a manner robust to their motion. In this study, we have two goals:
1) We analyze the synchronization requirements for distributed beamforming, the impact of UAV motion, along with their impact of post beamforming SNR. We develop distributed synchronization algorithms to meet these requirements and simulate their performance.
2) We implement these algorithms using software-defined-radios. UAV testbeds are built and used to prototype the proposed concepts. Using the performed experiments, we identify the performance bottlenecks and challenges and use them for further improvements.
Staff
- Primary Investigators: Danijela Čabrić
- Students: Samer Hanna, and Enes Krijestorac
Selected publications
S. Hanna and D. Cabric, "Distributed Transmit Beamforming: Analyzing the Maximum Communication Range", to appear in IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM 2022)
S. Hanna and D. Cabric, "Distributed Transmit Beamforming: Design and Demonstration from the Lab to UAVs," Submitted to IEEE Transactions on Wireless Communications 2021