E. Krijestorac, H. Sallouha, S. Sarkar, D. Cabric, "Agile Radio Map Prediction Using Deep Learning," in the 2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), June 2023
Cognitive Reconfigurable Embedded Systems Lab
-
 CORES Lab - UCLA
CORES Lab - UCLA
Faculty
PhD Students
Deep Learning for Optimal UAV Basestation Placement
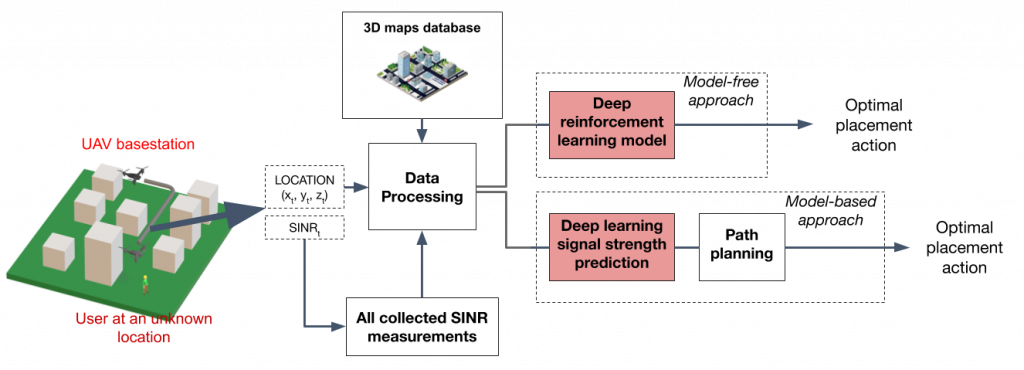
Mobile unmanned aerial vehicles (UAVs) acting as basestations can optimize their position to maximize the signal strength to user equipment on the ground. In this project, we explore two different placement optimization approaches: model-free and model-based.
In the model-free approach, the UAV does not aim to predict the signal strength across the entire optimization space but rather finds a path that maximizes the expected increase in signal strength. We use deep reinforcement learning (deep RL) to optimally place the UAV without the previous knowledge of the channel or user location. The algorithm relies on signal strength measurements and a 3D map of the topology to account for blockage and scatterers. Furthermore, it is designed to operate in any urban environment.
The model-based approach relies on being able to predict the signal strength across the entire optimization space and use that to find the optimal path to maximize the signal strength. At the heart of the model-based approach is a novel spatial signal strength prediction algorithm. Inspired by the successes of artificial neural networks in physics modeling, we use deep neural networks (DNNs) to predict the radio signal strength field in an urban environment. Our algorithm relies on samples of signal strength collected across the prediction space and a 3D map of the environment, which enables it to predict the scattering of radio waves.
Staff:
Primary Investigator: Danijela Cabric
Students: Enes Krijestorac, Samer Hanna
Selected publications:
E. Krijestorac, S. Hanna, D. Cabric, "Spatial Signal Strength Prediction using 3D Maps and Deep Learning", in IEEE ICC 2021.
E. Krijestorac, S. Hanna, D. Cabric, "UAV Access Point Placement for Connectivity to a User with Unknown Location Using Deep RL", in IEEE Globecom 2019 AINGWC Workshop, August 2019.