Cognitive Reconfigurable Embedded Systems Lab
-
 CORES Lab - UCLA
CORES Lab - UCLA
Faculty
PhD Students
Distributed MIMO radar localization with UAV Swarm
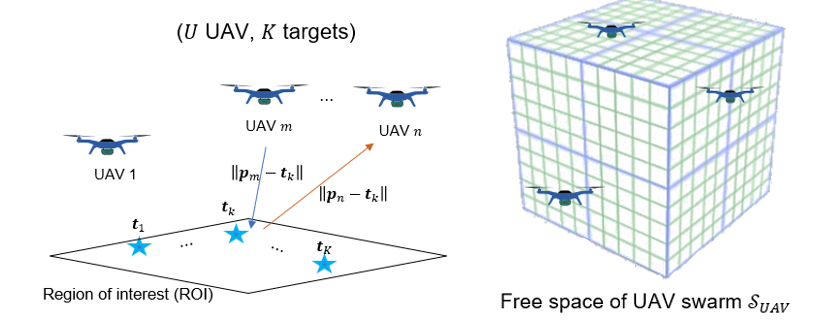
Cooperative target localization using unmanned aerial vehicles (UAVs) swarm is gaining popularity in many applications such as disaster detection, crowd surveillance, and rescue operation. In this project, a UAV swarm, featuring a single antenna RF transceiver per UAV, is considered and regarded as a distributed MIMO radar system for a problem of target localization. By exploiting the mobility of the UAV swarm, we aim to propose optimal design of UAV placement and DSP algorithms for the corresponding system to improve the performance of localization.
- To reduce the number of measurements and computational complexity, the compressive sensing based (CS-based) algorithm is applied.
- we propose two UAV placement optimization algorithms to improve the performance of CS-based target localization. Simulation results show that compared to the random UAV placement, the mutual coherence of the measurement matrix is reduced and the localization root mean square error (RMSE) is significantly improved under the proposed UAV placement.
Staff
- Principal Investigator: Danijela Cabric
- Students: Yen-Chin Wang
Publication
- Y.-C. Wang and D. Cabric, “Distributed UAV Swarm Placement Optimization for Compressive Sensing based Target Localization,” in 2023 International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, February 2023
- Y.-C. Wang and D. Cabric, “Spectrum Efficient Distributed LFMCW Radar System for High Resolution Localization,” in 2021 17th International Symposium on Wireless Communication Systems (ISWCS), September 2021